
Multi Agent Cybernetic Development and Research
The Wiglaf Project
|
Wiglaf is a mobile general purpose platform that uses a bogey rocker system to move around. It is designed to test interfacing between Grendel One and a mobile cybernetic device, and to provide Grendel with a mobile platform to explore the lab. This series of pictures shows the design and build up of the main rocker arms. 




I have a bogey design, I'll upload pictures shortly. I'm using combination of Eitech and Tronico building sets for the body. they are great for prototyping robots, v similar to Meccano and Erector set parts but metric. The wheels in these sets are worthless for robotics, they are too light weight, have no tread, and do not have good systems for rigging up a drive to an axle. that will be the next project. It is likely I'll print wheels on my 3d printer and then buy roller bearings, and design my own system. I've ordered a Raspberry pi Zero W to use for control. It is likely that the W will be dedicated to running the device for movement and a second Pi, probably a 3B will handle tasks such as visual processing and decision making. 


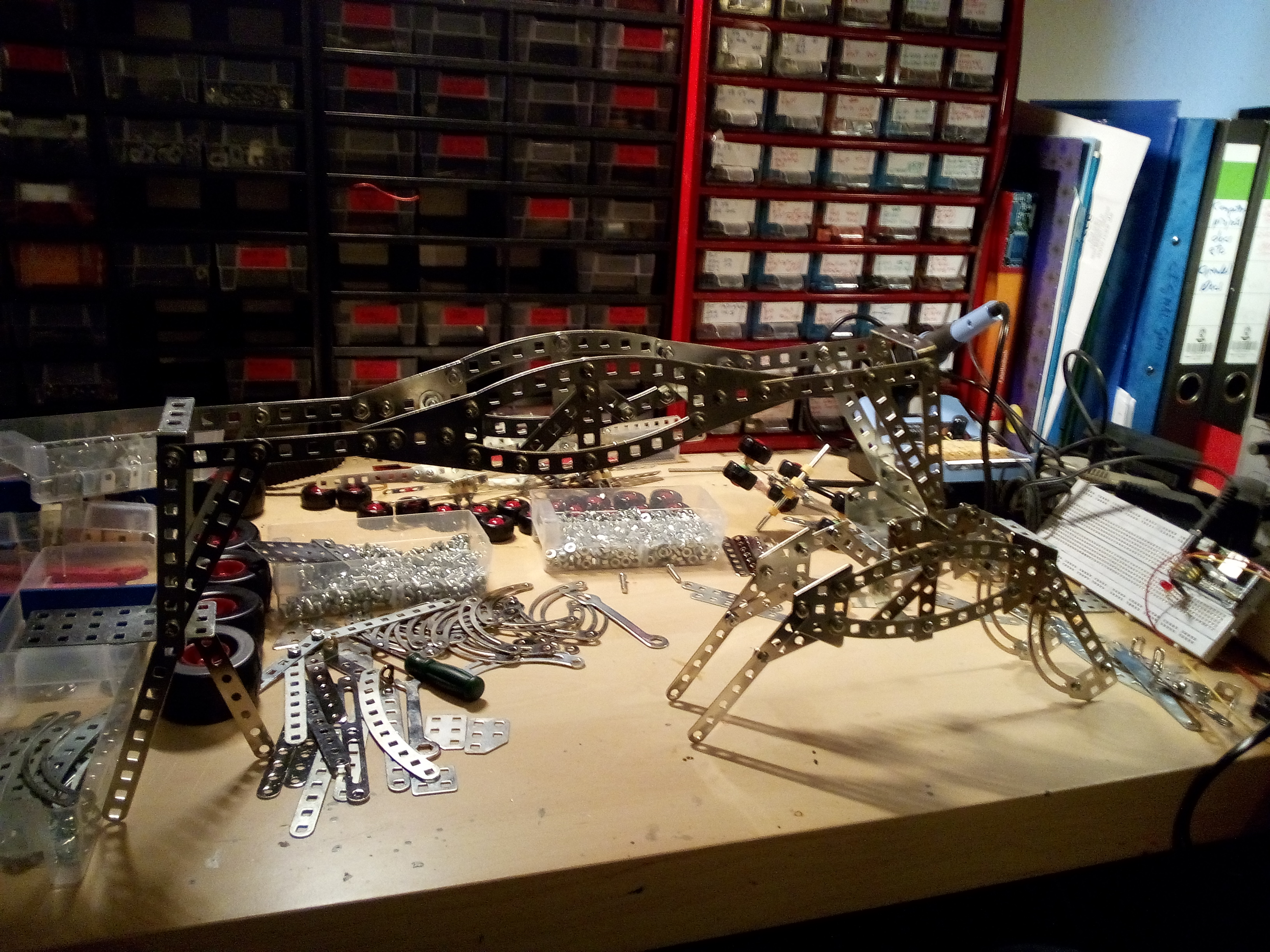
OK I have all the parts here. The mechanical structure should be finished sometime next week. Niander Wallace.... We are coming for you.
|
